Thanks to @toggledbits for adding a custom CSS. I've started doing a darker Reactor style.
Here's the file: https://gist.github.com/dbochicchio/825098ac13b7f8cac22012eae37ff7ce
A couple of things are still too bright and I'll eventually catch-up. Just place it under your /config directory, naming the file as customstyles.css. Hard refresh your browser.
Hi
I have just connected a bunch of EzloPi controllers to MSR to import some ESP based devices etc.
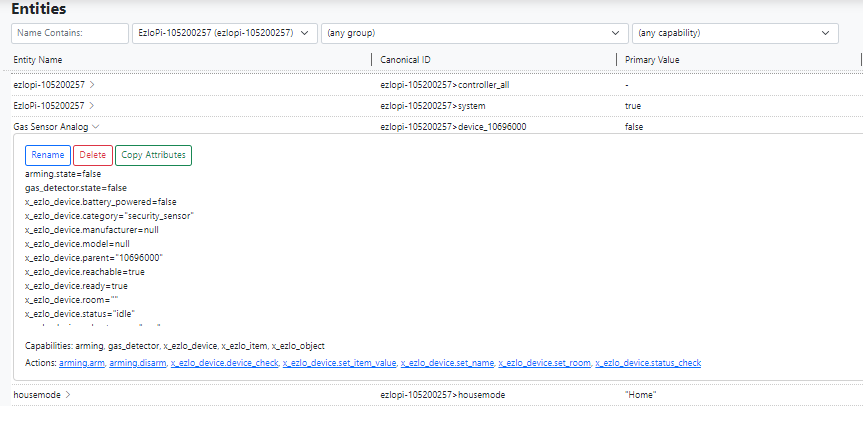
They all seemed to have worked and imported in to MSR apart from I have one missing device. It is a Digital Gas Sensor device.
This is how that device looks in the Ezlo API.
Devices Info:
_id: "10696001" deviceTypeId: "ezlopi" parentDeviceId: "10696000" category: "level_sensor" subcategory: "" gatewayId: "457a5069" batteryPowered: false name: "Gas Sensor Digital" type: "sensor" reachable: true persistent: true serviceNotification: false armed: false roomId: "" security: "no" ready: true status: "idle" parentRoom: true protectConfig: "default"Items Info:
_id: "20696001" deviceId: "10696001" hasGetter: true hasSetter: false name: "smoke_density" show: true valueType: "substance_amount" scale: "parts_per_million" value: 2.7472610473632812 valueFormatted: "2.75" status: "idle"There is also an Analog Gas sensor that one did import in to MSR OK.
68d63dab-b871-4f44-912b-cf6e0b9eb4c6-image.png
{kind=link}
Devices Info:
_id: "10696000" deviceTypeId: "ezlopi" parentDeviceId: "10696000" category: "security_sensor" subcategory: "gas" gatewayId: "457a5069" batteryPowered: false name: "Gas Sensor Analog" type: "sensor" reachable: true persistent: true serviceNotification: false armed: false roomId: "" security: "no" ready: true status: "idle" parentRoom: true protectConfig: "default"Items Info:
_id: "20696000" deviceId: "10696000" hasGetter: true hasSetter: false name: "gas_alarm" show: true valueType: "token" enum: 0: "no_gas" 1: "combustible_gas_detected" 2: "toxic_gas_detected" 3: "unknown" valueFormatted: "no_gas" value: "no_gas" status: "idle"And this is how this MQ2 Gas Sensor looks like on their dashboard:
Digital
cb77dfa3-4af5-4d06-9635-89207a716a89-image.png
{kind=link}
Analog
4fb4da1b-e946-4b89-876c-bcd9f5699b6c-image.png
{kind=link}
They have an EzloPi website here you can create your own sensor projects using ESP boards, which is very interesting stuff!
And I just wrote on the Ezlo forum here, how to connect an EzloPi controller to MSR.
THANKS.
Build 21228 has been released. Docker images available from DockerHub as usual, and bare-metal packages here.
Home Assistant up to version 2021.8.6 supported; the online version of the manual will now state the current supported versions; Fix an error in OWMWeatherController that could cause it to stop updating; Unify the approach to entity filtering on all hub interface classes (controllers); this works for device entities only; it may be extended to other entities later; Improve error detail in messages for EzloController during auth phase; Add isRuleSet() and isRuleEnabled() functions to expressions extensions; Implement set action for lock and passage capabilities (makes them more easily scriptable in some cases); Fix a place in the UI where 24-hour time was not being displayed.Hi @toggledbits,
I have lots of logs with this:
<Engine:ERR> Assignment to alarm ignored -- expression-driven global cannot be set by assignmentAny hints to where look at to avoid this? Thanks.
A couple of things for you @toggledbits, since you mentioned that this release has new features and some tweaks are expected.
Local expressions cannot be deleted. Pushing the X button has no effect for me.
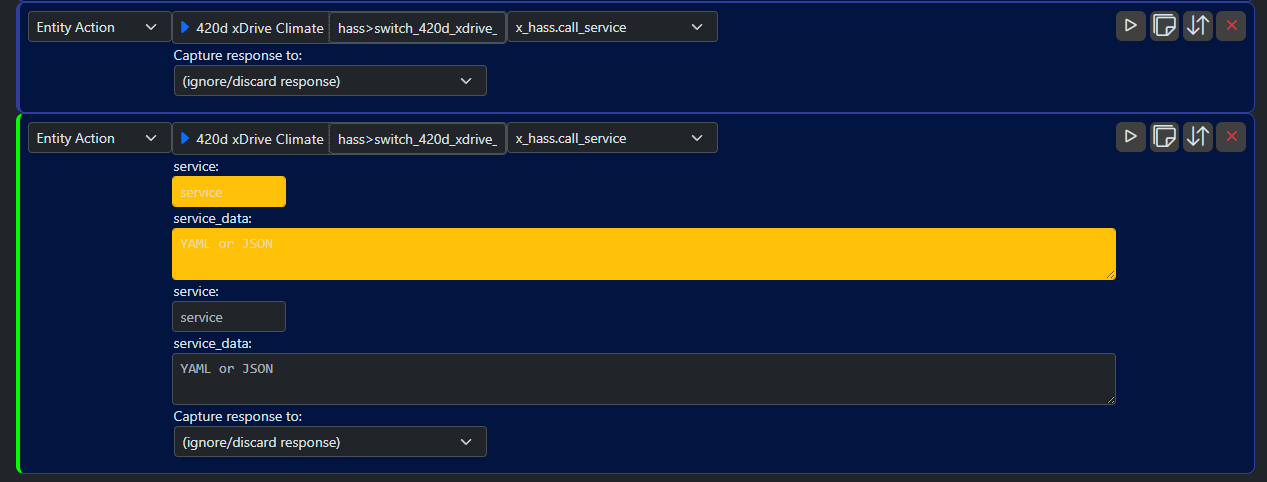
When cloning an entity action, the result is strange (first is cloned one, second is the original action):
a92ea094-9e2c-4aaa-bf47-2d07a6ffdbd0-image.png
{kind=link}
When changing the action on the cloned element, the params are added to the original one. See screenshot:
92ac3011-83c8-466b-bd23-47d483ad7a52-image.png
{kind=link}
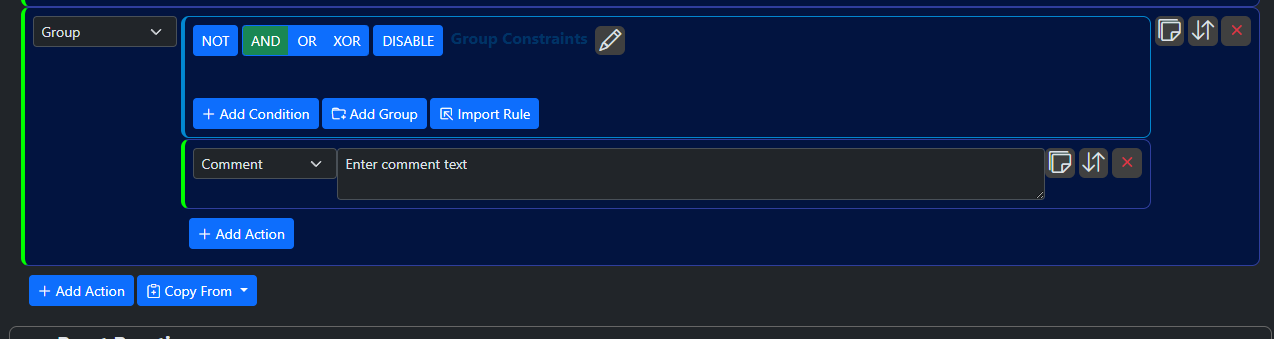
Dark theme has a couple of strange contrasts. One is visible in the previous screenshots (white text on yellow background). Another one is in groups (blue text on blue background):
9b3c4988-53ef-44e6-9672-30e744cacb75-image.png
Overall, I found blue, yellow, red and green (in buttons and forms) to be too bright.
{kind=link}
On the bright side:
I love the new script action: thank you! The dark theme is a great start to avoid getting blinded at night I promise I'll try very soon the new features around actions. Thanks!@toggledbits
I just upgraded to version MSR 24293, bare metal running on Fedora. Upon restart, I am getting a error banner:
I followed the new directions about npm
npm i --no-save --no-package-lock --omit dev
Any idea what the issue is?
Seems like switching the UI to the newly added dark mode (thank you for this) does nothing. The UI stays in light mode and only a few buttons turn into dark mode (see screenshot)
Things I have tried:
Hard refresh
Different browser
Different computer
Restarting Reactor
Failed troubleshooting attempts:
No errors in Chrome console
No relevant errors in Reactor log (can still PM the full log file)
Reactor version: latest-24293-ea42a81d
Hardware: Odroid N2+
Linux version: Ubuntu 24.04.1 LTS
3df2806f-9146-485b-9ec1-d056e91cefe5-image.png Dark mode enabled
{kind=link}
ff823023-c079-4684-b01f-d6ac6527d31a-image.png Light mode enabled
{kind=link}
Good morning,
I have a service MQTT service that needs a restart occasionally. The add-on (Smartbed MQTT) is for the smart bed base for my bed. It has a "safety light" that I can control from HAAS & MSR as a light entity, and also moves the head of the bed to a preset at bedtime, and then lies it back flat in the morning The problem is, from time to time, the light becomes "unavailable" Restarting from the Add-ons tab in HAAS always fixes it, but I should be able to detect when it happens when "light.tempur_pedic_safety_lights" is not true or false, i.e., unavailable.
What I don't know how to do is how to restart that service. Does anybody have experience in restarting add-ons from MSR?
Running:
Reactor (Multi-hub) latest-24212-3ce15e25 ZWaveJSController [0.1.24232]HAAS:
RPi5-64 (8GB) Core 2024.7.3 Supervisor 2024.08.0 Operating System 13.0 Frontend 20240710.0Hi!
Is it possible to generate two additional log files, the first being the replica of what is displayed on screen by the Rule History widgets and the other with Recently Changed Entities?
And could I configure the generation of one file per day, and delete the older ones? For example, store the last 5 days?
And being more ambitious, does Windget have an icon to open these TXT files in the navigated?
Well, we're approaching Christmas, so here's my request to Santa Claus @toggledbits 🙂
Hi @toggledbits
I'm working on a controller to generate llm response from a prompt in reactor. I have http response coming thru an http request action at the moment, capturing the response inside a local variable. So, it's practically sync.
I want to create a controller, so I don't have to rely on a proxy (and have a simpler architecture), and duplicate absurd http actions, but AFAIK in the current implementation, actions are async only. But if I have multiple requests going on, I cannot be sure what it's really inside an attribute. I also thought that something like a correlation id when sending the request could be used to identity multiple responses, but I wanted to double check with you before starting with something too complicated. I also noticed that some actions in home assistant (ie forecast) are sync and I'm wondering if you have any plan or hint to address this situation. Thanks.
Thanks.
@togglebits I am curious as to why the tilt_sensor.state (primary) = NULL. I believe it should show true or false. I have to use binary_sensor.state instead in my rules.
Again, not sure if this is related to Reactor/ZwaveJSController implementation or the actual Z-Wave JS UI docker version. I have copied, below, the attributes of the tilt sensor in hopes it can help.
Thanks in advance.
Reactor version 23302
ZWaveJSController version 23254
Z-Wave JS UI version 9.3.0.724519f
zwave-js version 12.2.3
@toggledbits I have noticed after upgrading both Reactor and ZWaveJSController to version 24257 that two of my devices/entities, TILT-ZWAVE2.5-ECO and Zooz ZSE18, had their entity re-named in an unusual way and also appears to be duplicated.
Reactor version 24257
ZWaveJSController version 24257
Z-Wave JS UI version 9.18.1
zwave-js version 13.2.0
Vestibule Motion Sensor State attributes/partial screenshot of entities it created. All entities have the same attributes.
motion_sensor.state=true x_zwave_values.Notification_Home_Security_Motion_sensor_status=8 zwave_device.capabilities=[113] zwave_device.endpoint=0 zwave_device.failed=null zwave_device.manufacturer_info=null zwave_device.node_id=23 zwave_device.valueId=[113,"Notification","Home Security","Home Security","Motion sensor status","Motion sensor status"] zwave_device.version_info=null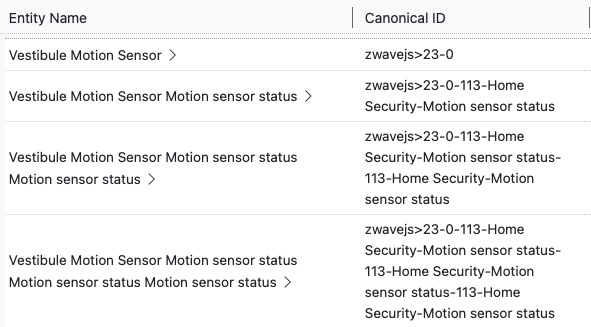{kind=link}
Tilt Sensor Door State and Tilt Sensor Door State Simple attributes/partial screenshot of entities it created. All entities have similar attributes with exception of x_zwave_values.Notification_Access_Control_Door_State = 22 or 23.
tilt_sensor.state=true x_zwave_values.Notification_Access_Control_Door_state=22 zwave_device.capabilities=[113] zwave_device.endpoint=0 zwave_device.failed=null zwave_device.manufacturer_info=null zwave_device.node_id=24 zwave_device.valueId=[113,"Notification","Access Control","Access Control","Door state","Door state"] zwave_device.version_info=null tilt_sensor.state=true x_zwave_values.Notification_Access_Control_Door_state_simple=22 zwave_device.capabilities=[113] zwave_device.endpoint=0 zwave_device.failed=null zwave_device.manufacturer_info=null zwave_device.node_id=24 zwave_device.valueId=[113,"Notification","Access Control","Access Control","Door state (simple)","Door state (simple)"] zwave_device.version_info=null tilt_sensor.state=false x_zwave_values.Notification_Access_Control_Door_state=23 zwave_device.capabilities=[113] zwave_device.endpoint=0 zwave_device.failed=null zwave_device.manufacturer_info=null zwave_device.node_id=24 zwave_device.valueId=[113,"Notification","Access Control","Access Control","Door state","Door state"] zwave_device.version_info=null tilt_sensor.state=false x_zwave_values.Notification_Access_Control_Door_state_simple=23 zwave_device.capabilities=[113] zwave_device.endpoint=0 zwave_device.failed=null zwave_device.manufacturer_info=null zwave_device.node_id=24 zwave_device.valueId=[113,"Notification","Access Control","Access Control","Door state (simple)","Door state (simple)"] zwave_device.version_info=null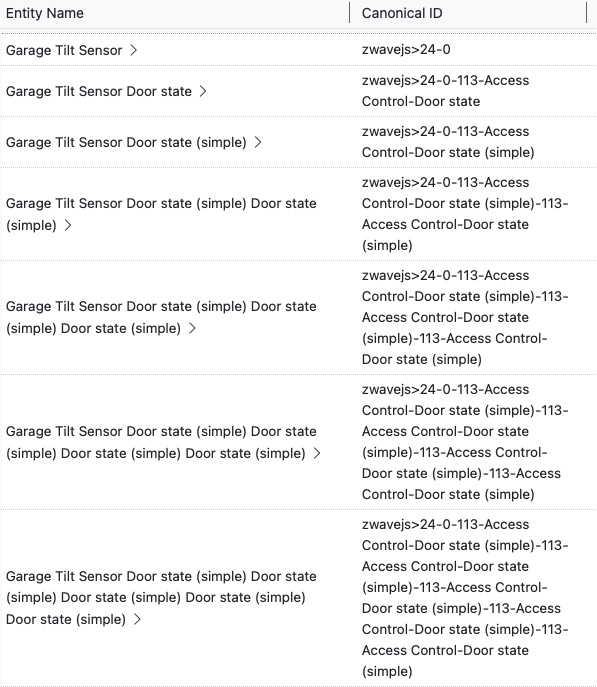{kind=link}
I'm slowly migrating all my stuff to MQTT under MSR, so I have a central place to integrate everything (and, in a not-so-distant future, to remove virtual devices from my Vera and leave it running zwave only).
Anyway, here's my reactor-mqtt-contrib package:
 GitHub - dbochicchio/reactor-mqtt-contrib: Contrib MQTT templates for Reactor
GitHub - dbochicchio/reactor-mqtt-contrib: Contrib MQTT templates for Reactor
GitHub - dbochicchio/reactor-mqtt-contrib: Contrib MQTT templates for Reactor
GitHub - dbochicchio/reactor-mqtt-contrib: Contrib MQTT templates for Reactor
Contrib MQTT templates for Reactor. Contribute to dbochicchio/reactor-mqtt-contrib development by creating an account on GitHub.
Simply download yaml files (everything or just the ones you need) and you're good to go.
I have mapped my most useful devices, but I'll add others soon. Feel free to ask for specific templates, since I've worked a lot in the last weeks to understand and operate them.
The templates are supporting both init and query, so you have always up-to-date devices at startup, and the ability to poll them. Online status is supported as well, so you can get disconnected devices with a simple expression.
Many-many thanks to @toggledbits for its dedication, support, and patience with me and my requests 🙂
Hi @toggledbits.
After a couple of weeks, I noticed that my Remotec zrc90 isn't working as expected.
Scenes are working in ZWaveJS, but this device has a strange behavior: the scene change, but then it's set again to null. In Reactor, this remains null:
battery_power.level=0.7 battery_power.since=1725817957361 x_debug.dt={"description":"Scene master 8 button remote","model":"BW8510/ZRC-90US","default_name":"Scene master 8 button remote","manufacturerId":21076,"productType":0,"productId":34064} x_zwave_values.Battery_isLow=false x_zwave_values.Battery_level=70 x_zwave_values.Central_Scene_scene_001=null x_zwave_values.Central_Scene_scene_002=null x_zwave_values.Central_Scene_scene_003=null x_zwave_values.Central_Scene_scene_004=null x_zwave_values.Central_Scene_scene_005=null x_zwave_values.Central_Scene_scene_006=null x_zwave_values.Central_Scene_scene_007=null x_zwave_values.Central_Scene_scene_008=null x_zwave_values.Central_Scene_slowRefresh=null x_zwave_values.Manufacturer_Specific_manufacturerId=21076 x_zwave_values.Manufacturer_Specific_productId=34064 x_zwave_values.Manufacturer_Specific_productType=1 x_zwave_values.Version_firmwareVersions=["1.1","1.1"] x_zwave_values.Version_hardwareVersion=3 x_zwave_values.Version_libraryType=2 x_zwave_values.Version_protocolVersion="4.5" x_zwave_values.Wake_Up_controllerNodeId=1 x_zwave_values.Wake_Up_wakeUpInterval=0 zwave_device.capabilities=[91,114,128,132,134] zwave_device.endpoint=0 zwave_device.failed=false zwave_device.generic_class="Remote Controller" zwave_device.impl_sig="24242:1:22315:1" zwave_device.is_beaming=false zwave_device.is_listening=false zwave_device.is_routing=false zwave_device.is_secure=false zwave_device.manufacturer_info=[21076,1,34064] zwave_device.max_data_rate=null zwave_device.node_id=154 zwave_device.specific_class="Simple Remote Control" zwave_device.status=2 zwave_device.status_text="awake" zwave_device.version_info=[null,"1.1"] zwave_device.wakeup_interval=0Anything I could look at? Thanks.
Hi, @toggledbits!
I have a question about the execution behavior. See the code below, and I'll explain the situation.
12957c3e-ff06-46c9-929d-b53f936665df-image.png
{kind=link}
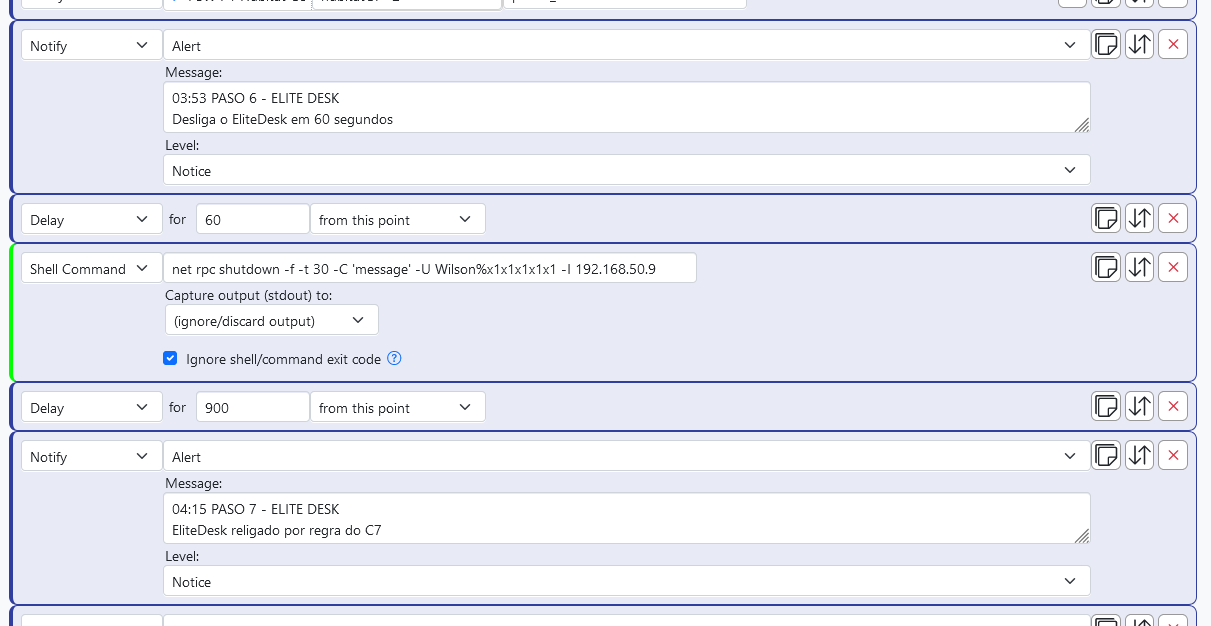
This is a routine that, at a certain point, determines that the desktop on which the VM hosting the Reactor is located receives an instruction to perform a shutdown (Shell Command).
When this happens, the desktop is turned off, and then Hubitat detects by a "ping" that the VM has been down, waits 15 seconds, turns off the power to this desktop, and then 15 seconds later turns on the desktop with the Reactor VM again.
After restarting the desktop, the VM is loaded, and the Reactor is triggered. Still, the following problem occurs: I expected that when the rule was continued to be executed again, the next step would be executed, that of the 900-second delay after shutdown, but the Shell command is executed again, and then it goes into a loop, the rule does not advance.
To break the loop, I first have to make the VM not load, change the desktop password, and then start the VM. In this case, Reactor generates an error when trying to execute the Shell Command because of the invalid password and then finishes the routine following the 900 delay step.
b58b0d4a-d6c1-4fe3-bab7-4222acea9607-image.png
{kind=link}
Is my interpretation that when it returns, the routine should continue to the next step that has not yet been executed incorrectly? Or does Reactor, through the shutdown command, interpret that it hasn't finished this step and keep trying, which is the correct reaction?
Thanks for clarifying.
Hi @toggledbits ,
I'm slowly moving my ZWave network from Vera to ZWaveJS. I successfully cloned my ZWave network using a spare Vera Edge (a new post for the community later when I'll be fully back from vacation) and I'm testing a couple of things before moving everything to ZWaveJS.
In the meanwhile, I have a couple of venetian blinds connected to Fibaro Roller Shutters 2 (FGR222) and I'm using some proprietary ZWave commands to control the tilt position, that right now I'm sending via Vera (with some code from the old place, messing with this):
af7f883c-f49e-419c-a2fe-8669572e3792-image.png
{kind=link}
The ZWaveJS values are reported via this:
x_zwave_values.Manufacturer_Proprietary_fibaro_venetianBlindsPosition=0 x_zwave_values.Manufacturer_Proprietary_fibaro_venetianBlindsTilt=0I hope there's a way to expose a separate device to control the tilt position directly, without doing the mess I'm doing now. Let me know if you need some files. Thanks.
As per @toggledbits request, new topic.
Position and cover commands not working and position/cover attributes are incorrect. Dimming is OK.
cover.state=null dimming.level=1 dimming.step=0.1 energy_sensor.units="kWh" energy_sensor.value=0.41 position.value=null power_sensor.units="W" power_sensor.value=0 power_switch.state=true x_debug.dt={"entity_class":"Cover","match":"deviceClass.generic.key=17;deviceClass.specific.key=6","capabilities":["cover","toggle","position"],"primary_attribute":"cover.state"} x_zwave_values.Meter_reset=null x_zwave_values.Meter_value_65537=0.41 x_zwave_values.Meter_value_66049=0 x_zwave_values.Multilevel_Switch_Down=null x_zwave_values.Multilevel_Switch_Up=null x_zwave_values.Multilevel_Switch_currentValue=99 x_zwave_values.Multilevel_Switch_duration="unknown" x_zwave_values.Multilevel_Switch_restorePrevious=null x_zwave_values.Multilevel_Switch_targetValue=99 x_zwave_values.Notification_Power_Management_Over_current_status=0 x_zwave_values.Notification_System_Hardware_status=0 x_zwave_values.Notification_alarmLevel=null x_zwave_values.Notification_alarmType=null zwave_device.capabilities=[38,50,113] zwave_device.endpoint=1 zwave_device.failed=null zwave_device.impl_sig="24225:1:22315:1" zwave_device.manufacturer_info=null zwave_device.node_id=148 zwave_device.version_info=nullThanks!
Having issues with a shell command
-
So everything last night was working OK when the PS4 was turned ON.
I am now testing when the PS4 is OFF.
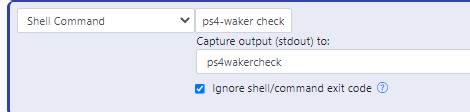
Some issues the shell command doesn't seem to be populating the ps4wakercheck variable for some reason and its null.
Vera device when PS4 is OFF
If I run the "ps4-waker check" command in terminal it outputs correctly as expected.
root@HP-Thin01:/home/stuart# ps4-waker check { "type": "device", "statusLine": "620 Server Standby", "statusCode": "620", "status": "Standby", "host-id": "C863F1400EF1", "host-type": "PS4", "host-name": "PS4-806", "host-request-port": "997", "device-discovery-protocol-version": "00020020", "system-version": "08520011", "address": "192.168.0.201" }Log file:
2021-08-02T10:51:27.077Z <Engine:NOTICE> Starting reaction PS4 Waker Check<SET> (rule-krq612qx:S) 2021-08-02T10:51:27.077Z <Engine:5:Engine.js:1378> Engine#1 reaction rule-krq612qx:S step 1 shell command { "command": "ps4-waker check", "rule": "rule-krq612qx", "rvar": "ps4wakercheck", "ignore_exit": true } 2021-08-02T10:51:27.094Z <Engine:5:Engine.js:1105> _process_reaction_queue() task returned, new status 3; task 19 2021-08-02T10:51:27.098Z <Engine:5:Engine.js:1140> _process_reaction_queue ending with 1 in queue; none delayed/ready; waiting 2021-08-02T10:51:27.617Z <Engine:ERR> Engine#1 reaction PS4 Waker Check<SET> step 1 error executing shell `ps4-waker check': Error: Command failed: ps4-waker check 2021-08-02T10:51:27.620Z <Rule:5:Rule.js:674> Rule#rule-krq612qx rule set variable ps4wakercheck = (object) (null) 2021-08-02T10:51:27.621Z <Engine:5:Engine.js:940> Engine#1 set variable rule rule-krq612qx ps4wakercheck=(null), requesting re-eval 2021-08-02T10:51:27.624Z <Rule:5:Rule.js:962> Rule#rule-krq612qx (PS4 Waker Check) evaluate() acquiring mutex 2021-08-02T10:51:27.625Z <Engine:5:Engine.js:1140> _process_reaction_queue() wake-up! 2021-08-02T10:51:27.625Z <Rule:5:Rule.js:966> Rule#rule-krq612qx._evaluate() mutex acquired, evaluating 2021-08-02T10:51:27.626Z <Rule:5:Rule.js:970> Rule#rule-krq612qx update rate is 2/min limit 60/min 2021-08-02T10:51:27.627Z <Rule:5:Rule.js:892> Rule#rule-krq612qx evaluateExpressions() with 3 expressions 2021-08-02T10:51:27.628Z <Rule:5:Rule.js:982> Rule#rule-krq612qx._evaluate() trigger state now false (was false) 2021-08-02T10:51:27.629Z <Rule:5:Rule.js:984> Rule#rule-krq612qx._evaluate() constraints state true 2021-08-02T10:51:27.629Z <Rule:5:Rule.js:993> Rule#rule-krq612qx rule state now false, changed no 2021-08-02T10:51:27.631Z <Engine:5:Engine.js:1101> _process_reaction_queue() running task 19 { "tid": 19, "id": "rule-krq612qx:S", "rule": "rule-krq612qx", "__reaction": [RuleReaction#rule-krq612qx:S], "next_step": 2, "status": 1, "ts": 1627901487069, "parent": --null--, "__resolve": --function--, "__reject": --function--, "__promise": [object Promise], "attempts": 1 } 2021-08-02T10:51:27.632Z <Engine:NOTICE> Resuming reaction PS4 Waker Check<SET> (rule-krq612qx:S) from step 2 2021-08-02T10:51:27.632Z <Engine:NOTICE> PS4 Waker Check<SET> delaying until 1627901492632<02/08/2021, 11:51:32> 2021-08-02T10:51:27.633Z <Engine:5:Engine.js:1105> _process_reaction_queue() task returned, new status 2; task 19 2021-08-02T10:51:27.636Z <Engine:5:Engine.js:1140> _process_reaction_queue() ending with 1 in queue; waiting for 1 (next delayed task)If I turn ON the PS4 it starts working again and the variable is populated with data via the shell command.
-
Make sure you restarted Reactor after installing the update. The ignore flag is in the action data (so the UI has done the right thing), but the log file content looks like an older version of the Engine running.
-
Any update on this?
-
Sorry for the delay.
Yes its working now after restarting MSR.
So when the PS4 is OFF its now reporting the status correctly from the ps4-waker check variables.
So its working when its on and off now.
However I am still getting some alert errors sometimes occasionally.
This seems to happen if the shell command doesn't return any response on the first go, but maybe on the second attempt it works and then populates the variables OK.
When this happens these alerts remain in the MSR gui etc.
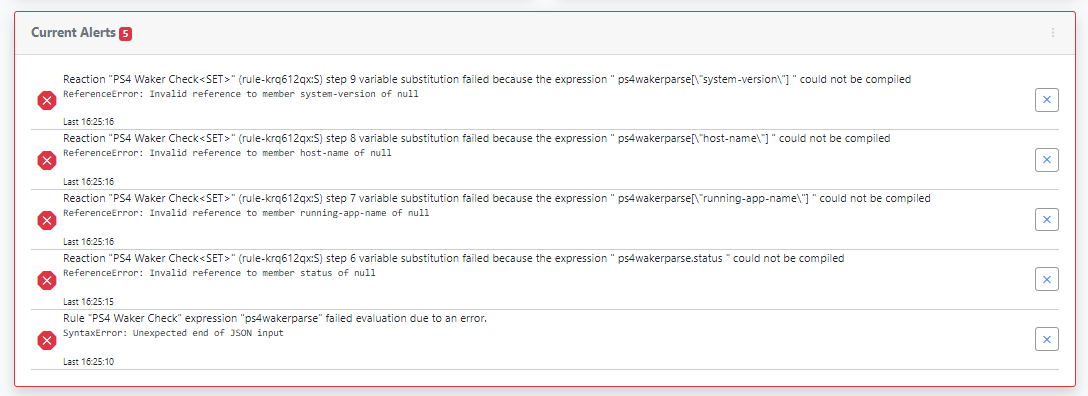
-
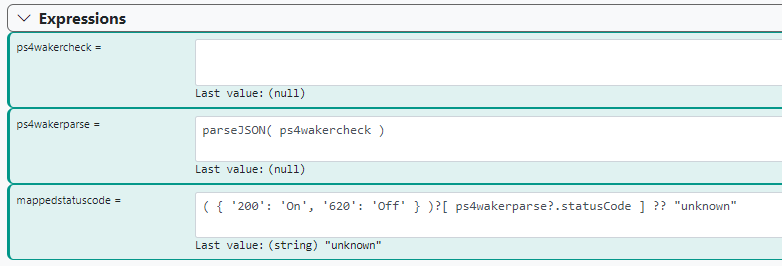
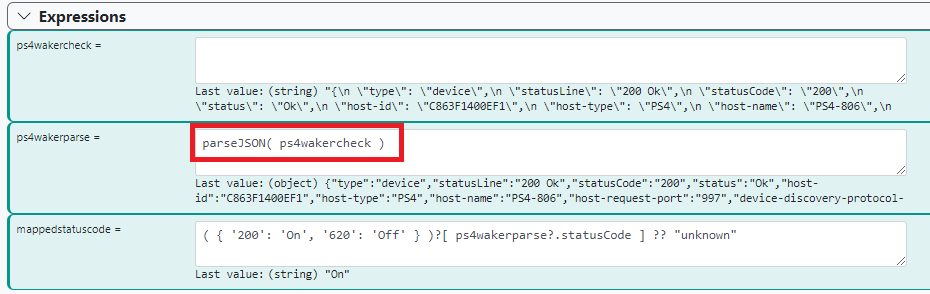
Use your coalesce operators on those expressions to suppress the reference errors and just yield a null result.
-
The actions in the Reaction that send the data to the Vera MutliString device, didn't have "?" in their expressions.
I have just added them like this:
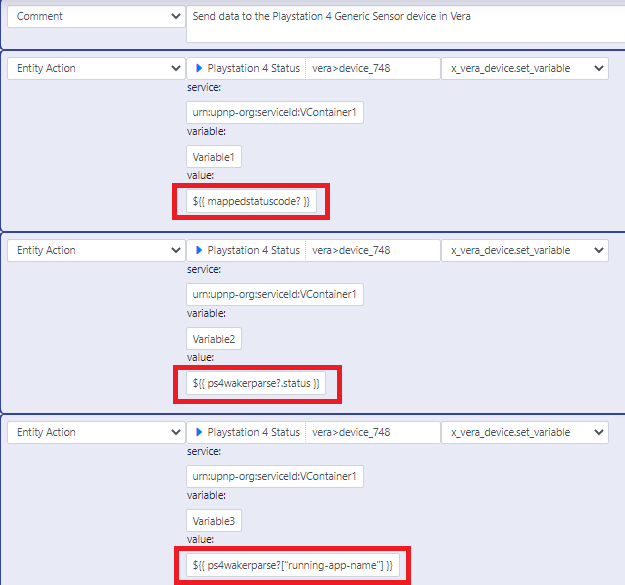
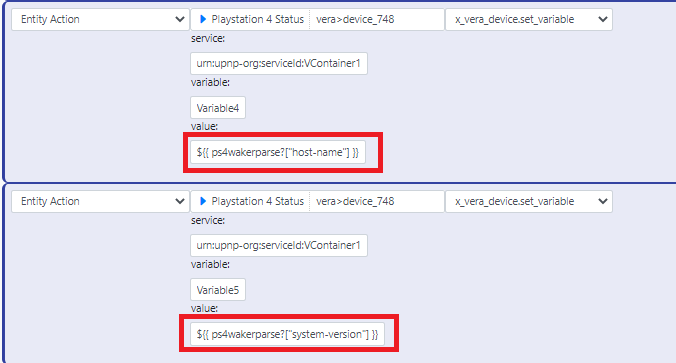
EDIT:
It doesn't like the first one " mappedstatuscode? " I've removed the question mark for that one.

-
I've also now added a virtual switch in Vera, this works with two new MSR rules (#3 and #4).
First rule (#4), that when the virtual switch it turned on or off manually in Vera / Home Remote app, it will send the appropriate power command to the ps4 via shell command:
ON = ps4-waker
OFF = ps4-waker standby
The second rule (#3) updates the state of the Vera virtual switch, if the PS4's power is controlled by some other outside means.
This rule monitors the "mappedstatuscode" expression variable, which will either say "On" or "Off" and then it adjusts the Vera virtual switch accordingly to match that current actual state of the PS4, so the virtual switch doesn't get out of sync.I am still experimenting with this, but my thinking was to have an additional "switch" in Vera / Home Remote app, to be able to manually / directly control the PS4's power (outside of a Harmony activity) as a backup switch. Say if the PS4 didn't turn on when the Harmony Activity for it was started and the other MSR rule (#1) didn't work with its attempt and didn't turn on the PS4.
Although having said that, I guess some kind of test and retry (in rule #1) to attempt to turn on the PS4 power again, might be a better way of doing it, if it failed to do so initially.
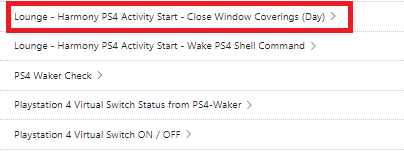
So in total I currently have four rules.
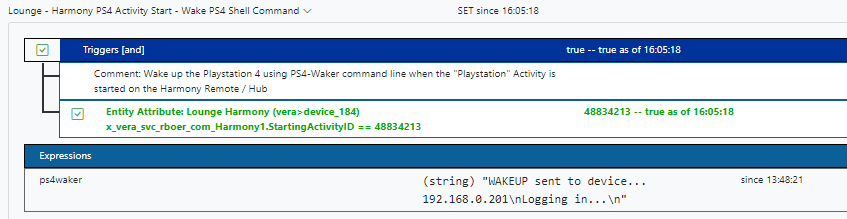
- "Lounge - Harmony PS4 Activity Start - Wake PS4 Shell Command"
Turns on PS4 when Harmony Activity is starting.
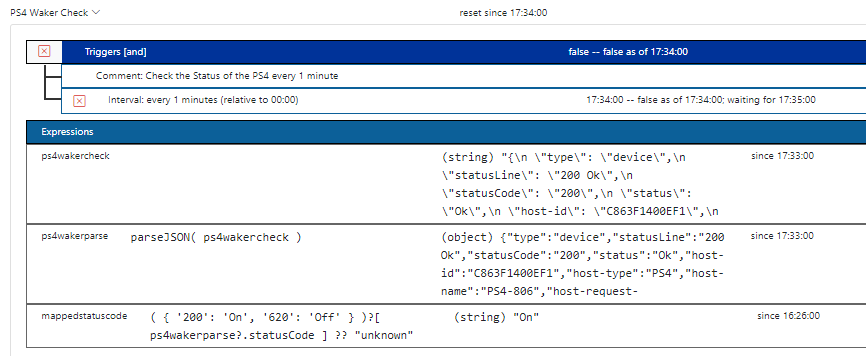
- "PS4 Waker Check"
This is the rule with all the expressions in it for the MultiString Vera device. Displays the PS4's current status etc
- "Playstation 4 Virtual Switch Status from PS4-Waker"
Controls the virtual switch in Vera based on the actual state of the PS4 power, info as coming from ps4-waker check and rule #2

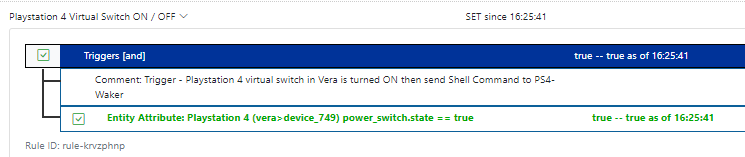
- "Playstation 4 Virtual Switch ON / OFF"
Sends either the on or off shell commands to the PS4 based on the virtual switch in Vera / Home Remote app being manually operated.
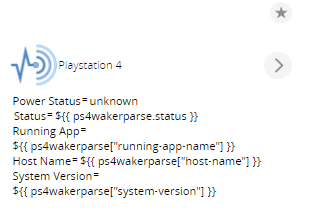
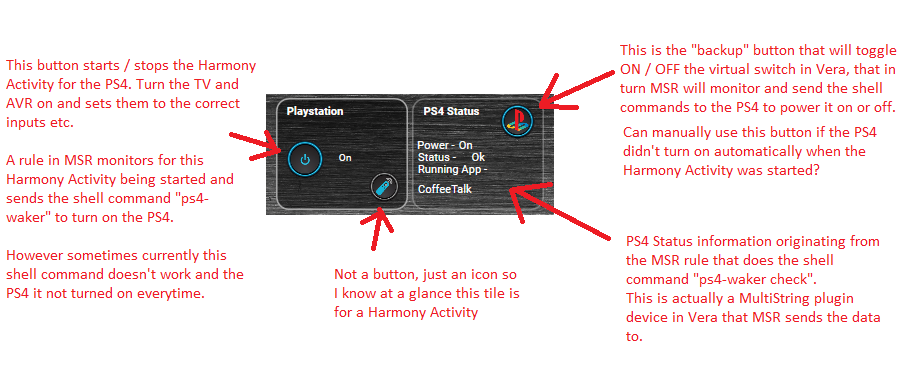
Home Remote tiles:
I am sure there must be better / easier ways of doing all this.
-
This seems to happen if the shell command doesn't return any response on the first go
Have you figured out what
ps4-wakerdoes when it doesn't get the device turned on? Does it return a particular exit code that isn't used by the on/off status result? Or does it just give an empty reply? Either way, you might write a wrapper script to detect that and retry (Reactor would then start the wrapper script instead ofps4-wakerdirectly.Issues like this are how you bring your shell scripting and system administration skills up a notch.
Author of Multi-system Reactor and Reactor, DelayLight, Switchboard, and about a dozen other plugins that run on Vera and openLuup.
-
@toggledbits said in Having issues with a shell command:
Have you figured out what ps4-waker does when it doesn't get the device turned on?
I'm not sure, I will look out for when it happens again.
I think it makes MSR error when it tries to send the "ps4-waker" command to turn ON the games console but fails to connect for whatever reason.
Most times it works and the console does turn on but sometimes it doesn't.
Thanks
-
Actually I have five MSR rules for the Playstation. I have another one that is also monitoring for the Harmony Activity starting, this rule closes the lounge blind and curtains if its daytime.
Would having two rules monitoring for the same trigger event, the Harmony Activity starting, have any affect on things?
Maybe one rule hi-jacks the other from triggering sometimes ?
-
@cw-kid said in Having issues with a shell command:
I'm not sure, I will look out for when it happens again.
The goal I propose is to write a script that runs
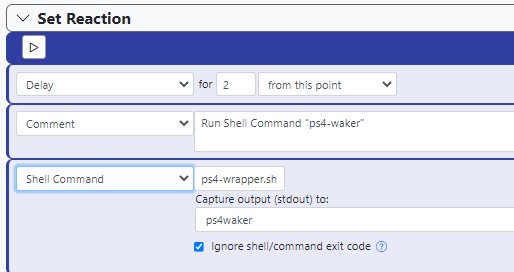
ps4-wakeritself, and retries if it fails to connect. MSR would then run that script instead of runningps4-wakerdirectly. If, for example, theps4-wakerscript simply returns no data (empty) result, then something like this would work:#!/bin/sh while true; do # Run command and capture its output and exit status output=`ps4-waker $*` status=$? # If output was produced, stop looping. if [ -n "$output" ]; then break; fi sleep 1 # slow retries down a little done # Echo back the command output and exit with its exit status. echo "$output" exit $statusSave this as
ps4-wrapper.shin the Reactor install directory (or somewhere along the path, like whereps4-wakercurrently is), and give it execute permissions (chmod 755 ps4-wrapper.sh).The wrapper script can be run in place of
ps4-waker, with the same arguments (e.g.ps4-wrapper.sh status). If a request fails and produces no output, it is simply re-run until output is produced (or until the command times out in Reactor, when it is killed).Author of Multi-system Reactor and Reactor, DelayLight, Switchboard, and about a dozen other plugins that run on Vera and openLuup.
-
@cw-kid said in Having issues with a shell command:
Maybe one rule hi-jacks the other from triggering sometimes ?
No, each rule has its own supervision of its entities of interest, etc. You'd be able to quickly confirm this by looking in the logs and seeing that the SET reactions for both rules run.
-
@toggledbits said in Having issues with a shell command:
The goal I propose is to write a script
Great thanks I will try this approach instead then.
But first I will leave things as is and see what happens? when it doesn't turn on the PS4 on first attempt.
It might just return no data in the response as you suggest, or it may as I seem to think, return something else, which I haven't documented here in this thread yet. But I can't remember off the top of my head what it was doing.
-
This isn't related to when the PS4 doesn't turn on.
When the PS4 is OFF / sleep mode, I am seeing this error alert appearing, to do with the parsing of the output to JSON.
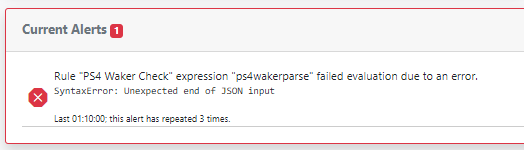
I assume this alert occurs if the "ps4-waker check" command hasn't worked and initially pulled in the data ?
Maybe I need two wrapper scripts then, one for turning on the power and one for the check command also.
-
Regarding the power on issue and maybe using a wrapper script.
When I manually run the "ps4-waker" command in terminal this is the output I get back:
WAKEUP sent to device... 192.168.0.201I don't see any alert in MSR gui when it fails to turn on the PS4 on its first and currently only attempt to do so.
Looking in the log I can't see anything there either as to why the command didn't turn on the PS4 ?
2021-08-04T13:08:32.530Z <Rule:5:Rule.js:660> Rule#rule-krpft5eh rule set variable ps4waker = (string) 2021-08-04T13:08:32.533Z <Engine:5:Engine.js:945> Engine#1 set variable rule rule-krpft5eh ps4waker=, requesting re-eval 2021-08-04T13:08:32.534Z <Rule:5:Rule.js:956> Rule#rule-krpft5eh (Lounge - Harmony PS4 Activity Start - Wake PS4 Shell Command) evaluate() acquiring mutex 2021-08-04T13:08:32.535Z <Engine:5:Engine.js:1145> _process_reaction_queue() wake-up! 2021-08-04T13:08:32.536Z <Rule:5:Rule.js:960> Rule#rule-krpft5eh._evaluate() mutex acquired, evaluating 2021-08-04T13:08:32.537Z <Rule:5:Rule.js:964> Rule#rule-krpft5eh update rate is 6/min limit 60/min 2021-08-04T13:08:32.537Z <Rule:5:Rule.js:887> Rule#rule-krpft5eh evaluateExpressions() with 1 expressions 2021-08-04T13:08:32.538Z <Rule:5:Rule.js:976> Rule#rule-krpft5eh._evaluate() trigger state now true (was true) 2021-08-04T13:08:32.539Z <Rule:5:Rule.js:978> Rule#rule-krpft5eh._evaluate() constraints state true 2021-08-04T13:08:32.540Z <Rule:5:Rule.js:987> Rule#rule-krpft5eh rule state now true, changed no 2021-08-04T13:08:32.541Z <Engine:5:Engine.js:1106> _process_reaction_queue() running task 2261 { "tid": 2261, "id": "rule-krpft5eh:S", "rule": "rule-krpft5eh", "__reaction": [RuleReaction#rule-krpft5eh:S], "next_step": 3, "status": 1, "ts": 1628082499978, "parent": --null--, "__resolve": --function--, "__reject": --function--, "__promise": [object Promise], "attempts": 2 } 2021-08-04T13:08:32.542Z <Engine:NOTICE> Resuming reaction Lounge - Harmony PS4 Activity Start - Wake PS4 Shell Command<SET> (rule-krpft5eh:S) from step 3 2021-08-04T13:08:32.542Z <Engine:INFO> Lounge - Harmony PS4 Activity Start - Wake PS4 Shell Command<SET> all actions completed. 2021-08-04T13:08:32.543Z <Engine:5:Engine.js:1110> _process_reaction_queue() task returned, new status -1; task 2261 2021-08-04T13:08:32.545Z <Engine:5:Engine.js:1145> _process_reaction_queue ending with 0 in queue; none delayed/ready; waiting 2021-08-04T13:08:32.832Z <Rule:5:Rule.js:748> Rule#rule-knn2os0h dependency notification entity-changed Entity#vera>device_184 from Entity#vera>device_184 2021-08-04T13:08:32.834Z <Rule:5:Rule.js:754> Rule#rule-knn2os0h requesting eval; entity-changed Entity#vera>device_184 2021-08-04T13:08:32.836Z <Rule:5:Rule.js:748> Rule#rule-klkppx0h dependency notification entity-changed Entity#vera>device_184 from Entity#vera>device_184 2021-08-04T13:08:32.837Z <Rule:5:Rule.js:754> Rule#rule-klkppx0h requesting eval; entity-changed Entity#vera>device_184 2021-08-04T13:08:32.838Z <Rule:5:Rule.js:748> Rule#rule-krpft5eh dependency notification entity-changed Entity#vera>device_184 from Entity#vera>device_184 2021-08-04T13:08:32.839Z <Rule:5:Rule.js:754> Rule#rule-krpft5eh requesting eval; entity-changed Entity#vera>device_184 2021-08-04T13:08:32.839Z <Rule:5:Rule.js:956> Rule#rule-knn2os0h (Lounge - Harmony XBOX Activity Start - Close Window Coverings (Day)) evaluate() acquiring mutex 2021-08-04T13:08:32.840Z <Rule:5:Rule.js:956> Rule#rule-klkppx0h (Lounge - Harmony Powered OFF - Turn OFF LED strips) evaluate() acquiring mutex 2021-08-04T13:08:32.841Z <Rule:5:Rule.js:956> Rule#rule-krpft5eh (Lounge - Harmony PS4 Activity Start - Wake PS4 Shell Command) evaluate() acquiring mutex 2021-08-04T13:08:32.841Z <Rule:5:Rule.js:960> Rule#rule-knn2os0h._evaluate() mutex acquired, evaluating 2021-08-04T13:08:32.842Z <Rule:5:Rule.js:964> Rule#rule-knn2os0h update rate is 6/min limit 60/min 2021-08-04T13:08:32.843Z <Rule:5:Rule.js:887> Rule#rule-knn2os0h evaluateExpressions() with 0 expressions 2021-08-04T13:08:32.844Z <Rule:5:Rule.js:976> Rule#rule-knn2os0h._evaluate() trigger state now false (was false) 2021-08-04T13:08:32.846Z <Rule:5:Rule.js:978> Rule#rule-knn2os0h._evaluate() constraints state false 2021-08-04T13:08:32.847Z <Rule:5:Rule.js:987> Rule#rule-knn2os0h rule state now false, changed no 2021-08-04T13:08:32.847Z <Rule:5:Rule.js:960> Rule#rule-klkppx0h._evaluate() mutex acquired, evaluating 2021-08-04T13:08:32.848Z <Rule:5:Rule.js:964> Rule#rule-klkppx0h update rate is 6/min limit 60/min 2021-08-04T13:08:32.848Z <Rule:5:Rule.js:887> Rule#rule-klkppx0h evaluateExpressions() with 0 expressions 2021-08-04T13:08:32.849Z <Rule:5:Rule.js:976> Rule#rule-klkppx0h._evaluate() trigger state now true (was true) 2021-08-04T13:08:32.850Z <Rule:5:Rule.js:978> Rule#rule-klkppx0h._evaluate() constraints state false 2021-08-04T13:08:32.851Z <Rule:5:Rule.js:987> Rule#rule-klkppx0h rule state now false, changed no 2021-08-04T13:08:32.851Z <Rule:5:Rule.js:960> Rule#rule-krpft5eh._evaluate() mutex acquired, evaluating 2021-08-04T13:08:32.852Z <Rule:5:Rule.js:964> Rule#rule-krpft5eh update rate is 7/min limit 60/min 2021-08-04T13:08:32.853Z <Rule:5:Rule.js:887> Rule#rule-krpft5eh evaluateExpressions() with 1 expressions 2021-08-04T13:08:32.854Z <Rule:5:Rule.js:976> Rule#rule-krpft5eh._evaluate() trigger state now true (was true) 2021-08-04T13:08:32.854Z <Rule:5:Rule.js:978> Rule#rule-krpft5eh._evaluate() constraints state true 2021-08-04T13:08:32.856Z <Rule:5:Rule.js:987> Rule#rule-krpft5eh rule state now true, changed no 2021-08-04T13:08:33.082Z <Rule:5:Rule.js:748> Rule#rule-knn2os0h dependency notification entity-changed Entity#vera>device_184 from Entity#vera>device_184 2021-08-04T13:08:33.083Z <Rule:5:Rule.js:754> Rule#rule-knn2os0h requesting eval; entity-changed Entity#vera>device_184 2021-08-04T13:08:33.084Z <Rule:5:Rule.js:748> Rule#rule-klkppx0h dependency notification entity-changed Entity#vera>device_184 from Entity#vera>device_184 2021-08-04T13:08:33.085Z <Rule:5:Rule.js:754> Rule#rule-klkppx0h requesting eval; entity-changed Entity#vera>device_184 2021-08-04T13:08:33.086Z <Rule:5:Rule.js:748> Rule#rule-krpft5eh dependency notification entity-changed Entity#vera>device_184 from Entity#vera>device_184 2021-08-04T13:08:33.087Z <Rule:5:Rule.js:754> Rule#rule-krpft5eh requesting eval; entity-changed Entity#vera>device_184 2021-08-04T13:08:33.088Z <Rule:5:Rule.js:956> Rule#rule-knn2os0h (Lounge - Harmony XBOX Activity Start - Close Window Coverings (Day)) evaluate() acquiring mutex 2021-08-04T13:08:33.089Z <Rule:5:Rule.js:956> Rule#rule-klkppx0h (Lounge - Harmony Powered OFF - Turn OFF LED strips) evaluate() acquiring mutex 2021-08-04T13:08:33.090Z <Rule:5:Rule.js:956> Rule#rule-krpft5eh (Lounge - Harmony PS4 Activity Start - Wake PS4 Shell Command) evaluate() acquiring mutex 2021-08-04T13:08:33.090Z <Rule:5:Rule.js:960> Rule#rule-knn2os0h._evaluate() mutex acquired, evaluating 2021-08-04T13:08:33.091Z <Rule:5:Rule.js:964> Rule#rule-knn2os0h update rate is 7/min limit 60/min 2021-08-04T13:08:33.091Z <Rule:5:Rule.js:887> Rule#rule-knn2os0h evaluateExpressions() with 0 expressions 2021-08-04T13:08:33.092Z <Rule:5:Rule.js:976> Rule#rule-knn2os0h._evaluate() trigger state now false (was false) 2021-08-04T13:08:33.093Z <Rule:5:Rule.js:978> Rule#rule-knn2os0h._evaluate() constraints state false 2021-08-04T13:08:33.094Z <Rule:5:Rule.js:987> Rule#rule-knn2os0h rule state now false, changed no 2021-08-04T13:08:33.095Z <Rule:5:Rule.js:960> Rule#rule-klkppx0h._evaluate() mutex acquired, evaluating 2021-08-04T13:08:33.095Z <Rule:5:Rule.js:964> Rule#rule-klkppx0h update rate is 7/min limit 60/min 2021-08-04T13:08:33.096Z <Rule:5:Rule.js:887> Rule#rule-klkppx0h evaluateExpressions() with 0 expressions 2021-08-04T13:08:33.097Z <Rule:5:Rule.js:1595> cond cond58zlosr evaluation state true->false 2021-08-04T13:08:33.098Z <Rule:5:Rule.js:1595> cond trig evaluation state true->false 2021-08-04T13:08:33.098Z <Rule:5:Rule.js:976> Rule#rule-klkppx0h._evaluate() trigger state now false (was true) 2021-08-04T13:08:33.099Z <Rule:5:Rule.js:978> Rule#rule-klkppx0h._evaluate() constraints state false 2021-08-04T13:08:33.100Z <Rule:5:Rule.js:984> Rule#rule-klkppx0h trigger conditions not met 2021-08-04T13:08:33.100Z <Rule:5:Rule.js:987> Rule#rule-klkppx0h rule state now false, changed no 2021-08-04T13:08:33.102Z <Rule:5:Rule.js:960> Rule#rule-krpft5eh._evaluate() mutex acquired, evaluating 2021-08-04T13:08:33.103Z <Rule:5:Rule.js:964> Rule#rule-krpft5eh update rate is 8/min limit 60/min 2021-08-04T13:08:33.103Z <Rule:5:Rule.js:887> Rule#rule-krpft5eh evaluateExpressions() with 1 expressions 2021-08-04T13:08:33.104Z <Rule:5:Rule.js:976> Rule#rule-krpft5eh._evaluate() trigger state now true (was true) 2021-08-04T13:08:33.105Z <Rule:5:Rule.js:978> Rule#rule-krpft5eh._evaluate() constraints state true 2021-08-04T13:08:33.105Z <Rule:5:Rule.js:987> Rule#rule-krpft5eh rule state now true, changed noI will try and implement the script now.
-
I've created the ps4-wrapper.sh file and made it executable and placed it in to the Reactor root directory as I cannot find where the actual ps4-waker utility is installed / located on the system.
When I try to run the script in terminal I get errors:
root@HP-Thin01:/home/stuart/reactor# bash ps4-wrapper.sh ps4-wrapper.sh: line 15: syntax error: unexpected end of file root@HP-Thin01:/home/stuart/reactor# sh ps4-wrapper.sh ps4-wrapper.sh: 14: ps4-wrapper.sh: Syntax error: end of file unexpected (expecting "then") root@HP-Thin01:/home/stuart/reactor#Also how do I modify the MSR rules to run the script instead of the command directly ?
I tried this:
Thanks
EDIT:
Seems it didn't like me creating the script in Notepad++ on Windows and copying it over to the Debian machine.
So I deleted the script and created it again using nano editor on Debian and now I can run the script OK from the terminal window and the PS4 did turn ON.

However I cannot run the script from the MSR rule still, nothing seems to happen when I play the reaction.
I can't see any errors related to ps4-wrapper.sh
2021-08-04T14:14:30.725Z <Engine:5:Engine.js:1145> _process_reaction_queue() wake-up! 2021-08-04T14:14:30.731Z <Engine:5:Engine.js:1106> _process_reaction_queue() running task 2373 { "tid": 2373, "id": "rule-krpft5eh:S", "rule": "rule-krpft5eh", "__reaction": [RuleReaction#rule-krpft5eh:S], "next_step": 1, "status": 0, "ts": 1628086468720, "parent": --null--, "__resolve": --function--, "__reject": --function--, "__promise": [object Promise], "attempts": 1 } 2021-08-04T14:14:30.731Z <Engine:NOTICE> Resuming reaction Lounge - Harmony PS4 Activity Start - Wake PS4 Shell Command<SET> (rule-krpft5eh:S) from step 1 2021-08-04T14:14:30.732Z <Engine:INFO> Engine#1 reaction Lounge - Harmony PS4 Activity Start - Wake PS4 Shell Command<SET> (rule-krpft5eh:S) step 2 shell command: ps4-wrapper.sh 2021-08-04T14:14:30.733Z <Engine:5:Engine.js:1382> Engine#1 action data { "command": "ps4-wrapper.sh", "rule": "rule-krpft5eh", "rvar": "ps4waker", "ignore_exit": true } 2021-08-04T14:14:30.749Z <Engine:5:Engine.js:1110> _process_reaction_queue() task returned, new status 3; task 2373 2021-08-04T14:14:30.751Z <Engine:5:Engine.js:1145> _process_reaction_queue ending with 1 in queue; none delayed/ready; waiting 2021-08-04T14:14:30.755Z <Rule:5:Rule.js:660> Rule#rule-krpft5eh rule set variable ps4waker = (string) 2021-08-04T14:14:30.755Z <Engine:5:Engine.js:945> Engine#1 set variable rule rule-krpft5eh ps4waker=, requesting re-eval 2021-08-04T14:14:30.756Z <Rule:5:Rule.js:956> Rule#rule-krpft5eh (Lounge - Harmony PS4 Activity Start - Wake PS4 Shell Command) evaluate() acquiring mutex 2021-08-04T14:14:30.757Z <Engine:5:Engine.js:1145> _process_reaction_queue() wake-up! 2021-08-04T14:14:30.758Z <Rule:5:Rule.js:960> Rule#rule-krpft5eh._evaluate() mutex acquired, evaluating 2021-08-04T14:14:30.758Z <Rule:5:Rule.js:964> Rule#rule-krpft5eh update rate is 1/min limit 60/min 2021-08-04T14:14:30.759Z <Rule:5:Rule.js:887> Rule#rule-krpft5eh evaluateExpressions() with 1 expressions 2021-08-04T14:14:30.760Z <Rule:5:Rule.js:976> Rule#rule-krpft5eh._evaluate() trigger state now true (was true) 2021-08-04T14:14:30.761Z <Rule:5:Rule.js:978> Rule#rule-krpft5eh._evaluate() constraints state true 2021-08-04T14:14:30.762Z <Rule:5:Rule.js:987> Rule#rule-krpft5eh rule state now true, changed no 2021-08-04T14:14:30.763Z <Engine:5:Engine.js:1106> _process_reaction_queue() running task 2373 { "tid": 2373, "id": "rule-krpft5eh:S", "rule": "rule-krpft5eh", "__reaction": [RuleReaction#rule-krpft5eh:S], "next_step": 3, "status": 1, "ts": 1628086468720, "parent": --null--, "__resolve": --function--, "__reject": --function--, "__promise": [object Promise], "attempts": 2 } 2021-08-04T14:14:30.764Z <Engine:NOTICE> Resuming reaction Lounge - Harmony PS4 Activity Start - Wake PS4 Shell Command<SET> (rule-krpft5eh:S) from step 3 2021-08-04T14:14:30.764Z <Engine:INFO> Lounge - Harmony PS4 Activity Start - Wake PS4 Shell Command<SET> all actions completed. 2021-08-04T14:14:30.765Z <Engine:5:Engine.js:1110> _process_reaction_queue() task returned, new status -1; task 2373 2021-08-04T14:14:30.767Z <Engine:5:Engine.js:1145> _process_reaction_queue ending with 0 in queue; none delayed/ready; waiting 2021-08-04T14:14:34.579Z <EzloController:5:EzloController.js:1069> EzloController#ezlo-plus received message 485 bytesJust seen an unrelated error in the logs
<EzloController:ERR> EzloController#ezlo-plus no implementation mapping for attributes from match * cap x_ezlo_object -
When you create the file on Windows in Notepad++, it will get Windows line endings (CR+LF) instead of Unix line endings (LF alone) and that confuses the shell. You can select the right line endings under the Edit > EOL Conversion in Notepad++.
If you modified the
ps4-wakercommand to be anything other thanps4-waker $*put it back the way I gave it to you. That lets you run the wrapper script with arguments on the command line that will get passed through, like this:./ps4-wrapper.sh statusor./ps4-wrapper.sh somethingelseIn the MSR rule, you should use
/full/path/to/ps4-wrapper.sh argumentsAuthor of Multi-system Reactor and Reactor, DelayLight, Switchboard, and about a dozen other plugins that run on Vera and openLuup.
-
@toggledbits said in Having issues with a shell command:
When you create the file on Windows in Notepad++, it will get Windows line endings (CR+LF) instead of Unix line endings (LF alone) and that confuses the shell. You can select the right line endings under the Edit > EOL Conversion in Notepad++.
Top tip thanks, I have changed that setting now in Notepad++
-
@toggledbits said in Having issues with a shell command:
If you modified the ps4-waker command to be anything other than ps4-waker $* put it back the way I gave it to you. That lets you run the wrapper script with arguments on the command line that will get passed through, like this: ./ps4-wrapper.sh status or ./ps4-wrapper.sh somethingelse
I haven't change the script, that line still says
output=`ps4-waker $*In the terminal I can use this command and it works and outputs the response
sh ps4-wrapper.sh checkSo the argument is passed OK.
I can also just run this command which turns on the PS4
sh ps4-wrapper.shThere is no argument for the command for turning on the PS4 as the command is just
ps4-wakerSo maybe this is the problem?
However I am unsure how to run the .sh file from my MSR rules?
Thanks
-
Best way is to use
/full/path/to/ps4-wrapper.sh arguments, but you may also get away with./ps4-wrapper.sh argumentsif it's in the Reactor install directory. Remember to set the file permissions for read and execute.