differentiation
-
I have a lot of integrations:
BMW Connected drive (Car location, status, AC, lock control)
Eight Sleep
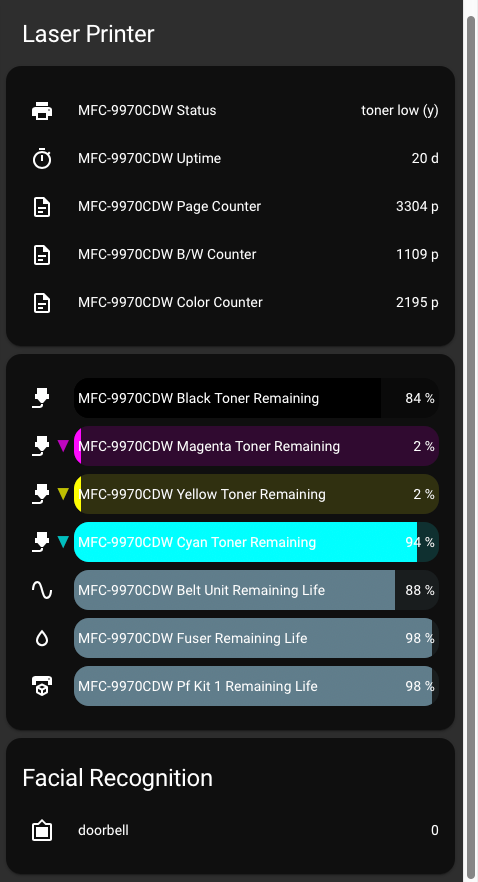
Brother Printers as sensors
Xiaomi robot and air filters
Facial recognitions on all my IPcams.
Foobot
I also use it as my zigbee bridge (using the vera's radio chip)
unifi POE switches so I can power cycle everything POE controlled.All of these are bridged back into virtual devices in OL. OL remains the master controller and HA is just a device bridge. It either triggers scenes, updates device variables on OL or executes device actions commanded by OL.
-
I have a lot of integrations:
BMW Connected drive (Car location, status, AC, lock control)
Eight Sleep
Brother Printers as sensors
Xiaomi robot and air filters
Facial recognitions on all my IPcams.
Foobot
I also use it as my zigbee bridge (using the vera's radio chip)
unifi POE switches so I can power cycle everything POE controlled.All of these are bridged back into virtual devices in OL. OL remains the master controller and HA is just a device bridge. It either triggers scenes, updates device variables on OL or executes device actions commanded by OL.
-
You have a couple of local options:
And there are additional ones cloud based, one of them is:
 Microsoft Face Identify
Microsoft Face Identify
Instructions on how to integrate Microsoft Face Identify into Home Assistant.
You will notice from the version introduced for these components that these are 2-3 or even 4 year old capabilities so forgive me for chuckling at what is going on in the "other place".