
UZB Long Range
-
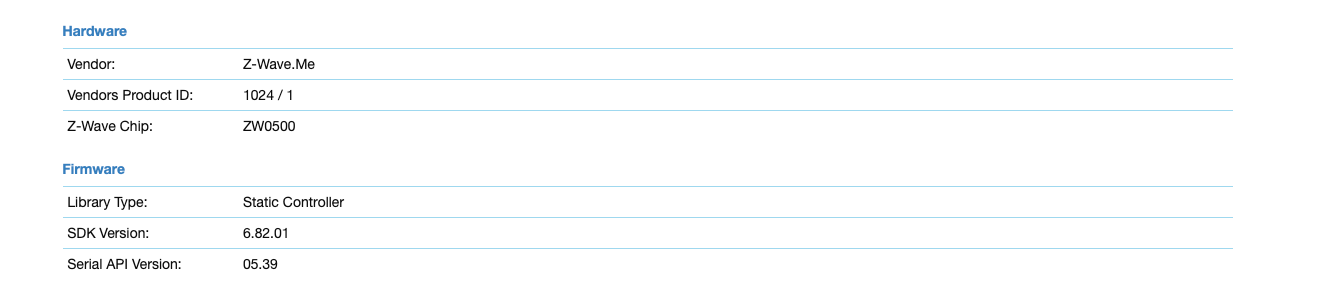
I have tested the 700 series chip, not on a uzb but back on the vera and back then the controller API was not ready. Looking deeper and understanding how zwave works, I have come to the conclusion that in terms of range, the new 700 series will not show much benefit from changing the controller (It explains why silabs focused on device implementation rather than controller). Long range means stronger signal strength from the controller. It doesn't mean it can receive from devices further away. The range of your mesh is therefore much more dependent on the signal strength of the devices than it is on the one from the controller....
The new chip may reduce the number of hops close to the controller... but upgrading the controller alone won't do much. Upgrading the devices alone however will improve the range for the simple reason that the limitation is generally coming from the devices (especially battery powered ones) rather than the controller (unless you have a weak controller antenna setup which is not the case of the uzb). Also, in most setups your range limitations are at the edge of your mesh and your controller is supposed to be at the center of it. The network range will benefit most from upgrading the nodes at the edge.Food for thought... My testing showed nearly 0 benefit.
-
Always good to know a new UZB is coming.
Thanks for the information.Hopefully this will also solve the debacle of bad stick production batches which makes firmware updating a nightmare.
Other than that, to me it looks like we will have to wait for nodes which use the same LR chip to be able to fully benefit it's potential.