





Having issues with a shell command
-
When you create the file on Windows in Notepad++, it will get Windows line endings (CR+LF) instead of Unix line endings (LF alone) and that confuses the shell. You can select the right line endings under the Edit > EOL Conversion in Notepad++.
If you modified the
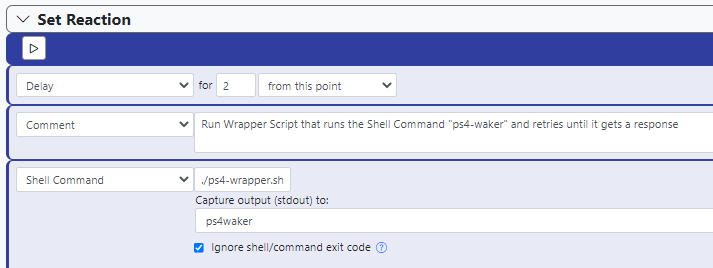
ps4-wakercommand to be anything other thanps4-waker $*put it back the way I gave it to you. That lets you run the wrapper script with arguments on the command line that will get passed through, like this:./ps4-wrapper.sh statusor./ps4-wrapper.sh somethingelseIn the MSR rule, you should use
/full/path/to/ps4-wrapper.sh argumentsAuthor of Multi-system Reactor and Reactor, DelayLight, Switchboard, and about a dozen other plugins that run on Vera and openLuup.
-
When you create the file on Windows in Notepad++, it will get Windows line endings (CR+LF) instead of Unix line endings (LF alone) and that confuses the shell. You can select the right line endings under the Edit > EOL Conversion in Notepad++.
If you modified the
ps4-wakercommand to be anything other thanps4-waker $*put it back the way I gave it to you. That lets you run the wrapper script with arguments on the command line that will get passed through, like this:./ps4-wrapper.sh statusor./ps4-wrapper.sh somethingelseIn the MSR rule, you should use
/full/path/to/ps4-wrapper.sh arguments@toggledbits said in Having issues with a shell command:
When you create the file on Windows in Notepad++, it will get Windows line endings (CR+LF) instead of Unix line endings (LF alone) and that confuses the shell. You can select the right line endings under the Edit > EOL Conversion in Notepad++.
Top tip thanks, I have changed that setting now in Notepad++
-
When you create the file on Windows in Notepad++, it will get Windows line endings (CR+LF) instead of Unix line endings (LF alone) and that confuses the shell. You can select the right line endings under the Edit > EOL Conversion in Notepad++.
If you modified the
ps4-wakercommand to be anything other thanps4-waker $*put it back the way I gave it to you. That lets you run the wrapper script with arguments on the command line that will get passed through, like this:./ps4-wrapper.sh statusor./ps4-wrapper.sh somethingelseIn the MSR rule, you should use
/full/path/to/ps4-wrapper.sh arguments@toggledbits said in Having issues with a shell command:
If you modified the ps4-waker command to be anything other than ps4-waker $* put it back the way I gave it to you. That lets you run the wrapper script with arguments on the command line that will get passed through, like this: ./ps4-wrapper.sh status or ./ps4-wrapper.sh somethingelse
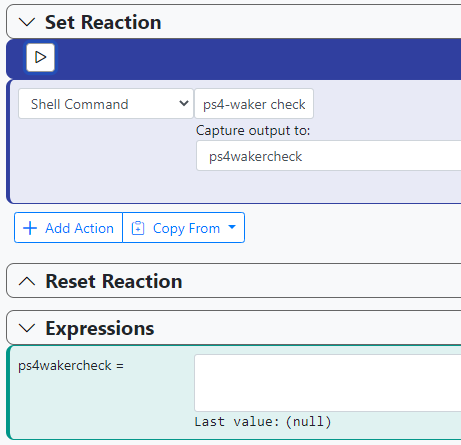
I haven't change the script, that line still says
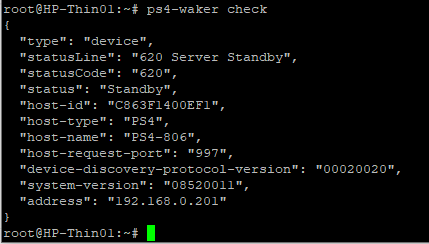
output=`ps4-waker $*In the terminal I can use this command and it works and outputs the response
sh ps4-wrapper.sh checkSo the argument is passed OK.
I can also just run this command which turns on the PS4
sh ps4-wrapper.shThere is no argument for the command for turning on the PS4 as the command is just
ps4-wakerSo maybe this is the problem?
However I am unsure how to run the .sh file from my MSR rules?
Thanks
-
Best way is to use
/full/path/to/ps4-wrapper.sh arguments, but you may also get away with./ps4-wrapper.sh argumentsif it's in the Reactor install directory. Remember to set the file permissions for read and execute.Author of Multi-system Reactor and Reactor, DelayLight, Switchboard, and about a dozen other plugins that run on Vera and openLuup.
-
Best way is to use
/full/path/to/ps4-wrapper.sh arguments, but you may also get away with./ps4-wrapper.sh argumentsif it's in the Reactor install directory. Remember to set the file permissions for read and execute.@toggledbits said in Having issues with a shell command:
./ps4-wrapper.sh
Seems to do the trick, the PS4 now turns on when this rules trigger happens, which is the Harmony Activity Starting.
I will modify the other rules now to use the wrapper script instead of issuing the commands directly.
Thanks again.
-
Excellent. If you've got a backup script running that takes care of just your
configandstorage, remember to add your wrapper script to its list of things to copy, since it's not in one of those directories.Author of Multi-system Reactor and Reactor, DelayLight, Switchboard, and about a dozen other plugins that run on Vera and openLuup.
-
Excellent. If you've got a backup script running that takes care of just your
configandstorage, remember to add your wrapper script to its list of things to copy, since it's not in one of those directories.@toggledbits said in Having issues with a shell command:
If you've got a backup script running that takes care of just your config and storage
I haven't got one, but I could really do with having a backup script running to copy those folders off the HP Thin Client to maybe my Windows file server or something. Or maybe even to a USB stick in the Thin Client if I can find a spare one big enough.
-
Those directories don't get very large, so a network copy is fine and will go fast. I distrust USB sticks, especially when left in devices, as they often have poor thermal management (not built to be left inserted full time) and degrade quickly like that, with little or no warning. Your backup media should be as reliable as possible.
Ezlo error is benign. I'll quiet it down.
Author of Multi-system Reactor and Reactor, DelayLight, Switchboard, and about a dozen other plugins that run on Vera and openLuup.
-
Those directories don't get very large, so a network copy is fine and will go fast. I distrust USB sticks, especially when left in devices, as they often have poor thermal management (not built to be left inserted full time) and degrade quickly like that, with little or no warning. Your backup media should be as reliable as possible.
Ezlo error is benign. I'll quiet it down.
@toggledbits said in Having issues with a shell command:
Those directories don't get very large
I've just checked:
Storage = 1.08MB
Config = 20.4KB
So yeah pretty small.
I will have to do some Googling how to create a script and schedule it to run, to copy the folders and files to my Windows server, as I have no idea how to do it under Debian terminal.
There is no desktop on that HP Thin Client running MSR.
in fact an inbuilt backup feature in MSR would be nice to have.
-
@toggledbits said in Having issues with a shell command:
Those directories don't get very large
I've just checked:
Storage = 1.08MB
Config = 20.4KB
So yeah pretty small.
I will have to do some Googling how to create a script and schedule it to run, to copy the folders and files to my Windows server, as I have no idea how to do it under Debian terminal.
There is no desktop on that HP Thin Client running MSR.
in fact an inbuilt backup feature in MSR would be nice to have.
@cw-kid said in Having issues with a shell command:
in fact an inbuilt backup feature in MSR would be nice to have.
I'll think about it, but my thoughts on it so far aren't leaning towards it.
It would have to be cross-platform (Windows, any flavor of Linux you can imagine including Macs, etc.), and to be at all effective, be able to store the backup somewhere other than the place it's backing up... a separate local volume? Windows server? NAS? An NFS share on a Linux server? SCP? FTP? RSYNC? HTTP PUT/POST?... so many options. Reliable backup depends on the local environment quite heavily, and your local knowledge of it and the risks you identify. Unlike Vera, this isn't a contained problem for a canned solution on proprietary hardware and software supported by a controlled cloud. And then, of course, people are going to want a one-click restore, and maybe even partial restore.
Maybe someday there will be backup, but for the moment, it's not a priority and anything I do is all but guaranteed to be a large effort that yields an inadequate result.
Author of Multi-system Reactor and Reactor, DelayLight, Switchboard, and about a dozen other plugins that run on Vera and openLuup.
-
@cw-kid said in Having issues with a shell command:
in fact an inbuilt backup feature in MSR would be nice to have.
I'll think about it, but my thoughts on it so far aren't leaning towards it.
It would have to be cross-platform (Windows, any flavor of Linux you can imagine including Macs, etc.), and to be at all effective, be able to store the backup somewhere other than the place it's backing up... a separate local volume? Windows server? NAS? An NFS share on a Linux server? SCP? FTP? RSYNC? HTTP PUT/POST?... so many options. Reliable backup depends on the local environment quite heavily, and your local knowledge of it and the risks you identify. Unlike Vera, this isn't a contained problem for a canned solution on proprietary hardware and software supported by a controlled cloud. And then, of course, people are going to want a one-click restore, and maybe even partial restore.
Maybe someday there will be backup, but for the moment, it's not a priority and anything I do is all but guaranteed to be a large effort that yields an inadequate result.
Yes I understand what you are saying and there could be many different ways to skin that cat.
But how about a more universal option? Most people will have a Google Drive or Microsoft One Drive cloud storage with their user accounts.
Could a backup option be added to upload to those types of cloud storage services?
-
Everything appears to all be working nicely now.
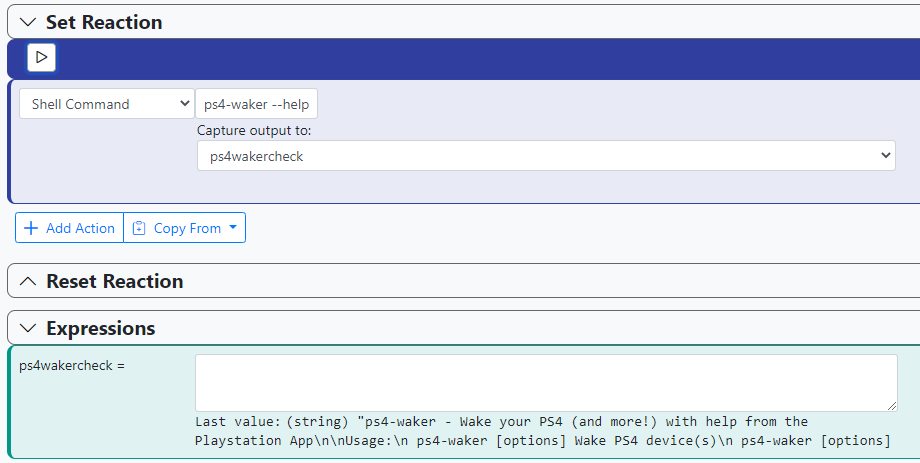
The only issue is sometimes I see this error alert
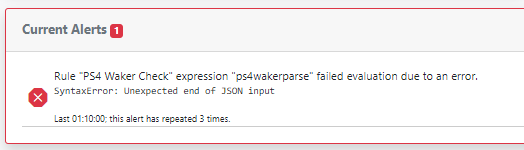
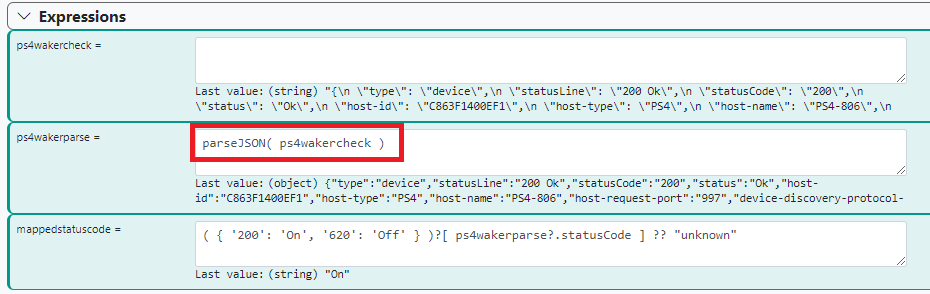
I assume it happens when the "ps4wakercheck" variable hasn't been populated with any data and therefore the "ps4wakerparse" variable has nothing to parse.
The ps4waker check rule is now using the wrapper script also, so if for whatever reason it didn't get data returned on its first attempt, it does on the second or subsequent attempts.
-
 T toggledbits locked this topic on
T toggledbits locked this topic on
-
 C cw-kid referenced this topic on
C cw-kid referenced this topic on